Hello, I realize this might be more of a math problem.
To draw the lines for my rectangles I need to solve for their corners. I have a rectangle center at (x,y) With a defined Width and Height.
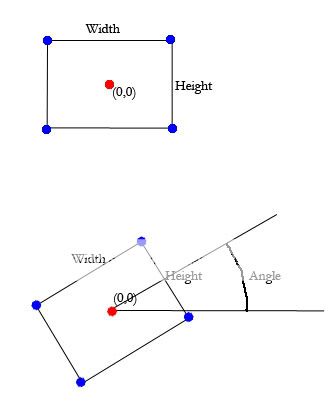
To find the blue points on a non rotated rectangle on top (angle = 0)
It is
UL = (x-Width/2),(y+height/2)
UR = (x+Width/2),(y+height/2)
LR = (x+Width/2),(y-height/2)
LL = (x-Width/2),(y-height/2)
How do I find the points if the angle isn't 0?
Thanks in advance.
Update: although I have (0,0) in my picture as the center point most likely the center point won't be at that location.