I need to rotate an 3D mesh object on an axis in C#.
Could you show me how this is done?
views:
672answers:
3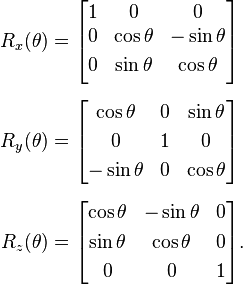
I suppose translate "on an axis" means around a certain predef. axis. So do not forget to translate as these matrices do not have the translation vector built in and so will rotate around the origin.
bastijn
2009-11-17 22:04:02
+2
A:
It depends what API you want to use:
In WPF you could do it like this:
<Viewport3D>
<Viewport3D.Camera>
<PerspectiveCamera Position="-40,40,40" LookDirection="40,-40,-40 "
UpDirection="0,0,1" />
</Viewport3D.Camera>
<ModelVisual3D>
<ModelVisual3D.Content>
<Model3DGroup>
<DirectionalLight Color="White" Direction="-1,-1,-3" />
<GeometryModel3D>
<Model3DGroup.Transform>
<RotateTransform3D>
<RotateTransform3D.Rotation>
<!-- here you do the rotation -->
<AxisAngleRotation3D x:Name="rotation" Axis="0 0 1" Angle="45" />
</RotateTransform3D.Rotation>
</RotateTransform3D>
</Model3DGroup.Transform>
<GeometryModel3D.Geometry>
<MeshGeometry3D Positions="0,0,0 10,0,0 10,10,0 0,10,0 0,0,10
10,0,10 10,10,10 0,10,10"
TriangleIndices="0 1 3 1 2 3 0 4 3 4 7 3 4 6 7 4 5 6
0 4 1 1 4 5 1 2 6 6 5 1 2 3 7 7 6 2"/>
</GeometryModel3D.Geometry>
<GeometryModel3D.Material>
<DiffuseMaterial Brush="Red"/>
</GeometryModel3D.Material>
</GeometryModel3D>
</Model3DGroup>
</ModelVisual3D.Content>
</ModelVisual3D>
</Viewport3D>
Or in codebehind c#:
this.rotation.Angle = 90;
If you use XNA you would use soemthing like Matrix.CreateRotationY and apply that to you ModelMesh instance.
Of course there are tons of 3rd party engines and apis that you could utilize. AN interesting choice might be SlimDX which is a slim wrapper around Direct3D sort of like Managed DirectX once was.
bitbonk
2009-11-17 22:16:03
+1
A:
Lets put some more detail in this.
Given the specifications for the rotation angle and rotation axis we can accomplish the rotation in a few steps.
- Translate the object so that the rotation axis passes through the coordinate system origin
- Rotate the object so that the axis of rotation coincides with one of the coordinate axes
- Perform the specified rotation about the selected coordinate axis.
- Apply inverse rotations to bring the rotation axis back to its original orientation.
- Apply the inverse translation to bring the rotation axis back to its original spatial position.
The code is an exercise for the reader as this is a brain training for me (computer graphics is a long time ago :d). Maybe when I'm up for it I'll post a bit more.
I believe it was something like: R(theta) = T^-1 . Rx^-1(alpha) . Ry^-1(Beta) . Rz(theta) . Ry(beta) . Rx(alpha) . T
Where:
- T = translation matrix
- Rx = rotation about x etc
Brain trainer edit
O we can simplify (even without using quarternations)


and (x,y,z) is a unit vector on the axis of rotation and is the angle of rotation.
if I may believe google. The prove is left as an exercise to the reader but I believe it is correct as far as I can see (source: Graphics Gems (Glassner, Academic Press, 1990).)
bastijn
2009-11-17 22:16:44