ackb is right that these vector based solutions cannot be considered true averages of angles, they are only an average of the unit vector counterparts. However, ackb's suggested solution does not appear to mathematically sound.
The following is a solution that is mathematically derived from the goal of minimising (angle[i] - avgAngle)^2 (where the difference is corrected if necessary), which makes it a true arithmetic mean of the angles.
First, we need to look at exactly which cases the difference between angles is different to the difference between their normal number counterparts. Consider angles x and y, if y >= x - 180 and y <= x + 180, then we can use the difference (x-y) directly. Otherwise, if the first condition is not met then we must use (y+360) in the calculation instead of y. Corresponding, if the second condition is not met then we must use (y-360) instead of y. Since the equation of the curve we are minimising only changes at the points where these inequalities change from true to false or vice versa, we can separate the full [0,360) range into a set of segments, separated by these points. Then, we only need to find the minimum of each of these segments, and then the minimum of each segment's minimum, which is the average.
Here's an image demonstrating where the problems occur in calculating angle differences. If x lies in the gray area then there will be a problem.
i3.photobucket.com/albums/y69/02williamsa6/angle_comparisons.png
(couldn't make it a link because I don't have enough reputation)
To minimise a variable, depending on the curve, we can take the derivative of what we want to minimise and then we find the turning point (which is where the derivative = 0).
Here we will apply the idea of minimise the squared difference to derive the common arithmetic mean formula: sum(a[i])/n. The curve y = sum((a[i]-x)^2) can be minimised in this way:
y = sum((a[i]-x)^2)
= sum(a[i]^2 - 2*a[i]*x + x^2)
= sum(a[i]^2) - 2*x*sum(a[i]) + n*x^2
dy\dx = -2*sum(a[i]) + 2*n*x
for dy/dx = 0:
-2*sum(a[i]) + 2*n*x = 0
-> n*x = sum(a[i])
-> x = sum(a[i])/n
Now applying it to curves with our adjusted differences:
b = subset of a where the correct (angular) difference a[i]-x
c = subset of a where the correct (angular) difference (a[i]-360)-x
cn = size of c
d = subset of a where the correct (angular) difference (a[i]+360)-x
dn = size of d
y = sum((b[i]-x)^2) + sum(((c[i]-360)-b)^2) + sum(((d[i]+360)-c)^2)
= sum(b[i]^2 - 2*b[i]*x + x^2)
+ sum((c[i]-360)^2 - 2*(c[i]-360)*x + x^2)
+ sum((d[i]+360)^2 - 2*(d[i]+360)*x + x^2)
= sum(b[i]^2) - 2*x*sum(b[i])
+ sum((c[i]-360)^2) - 2*x*(sum(c[i]) - 360*cn)
+ sum((d[i]+360)^2) - 2*x*(sum(d[i]) + 360*dn)
+ n*x^2
= sum(b[i]^2) + sum((c[i]-360)^2) + sum((d[i]+360)^2)
- 2*x*(sum(b[i]) + sum(c[i]) + sum(d[i]))
- 2*x*(360*dn - 360*cn)
+ n*x^2
= sum(b[i]^2) + sum((c[i]-360)^2) + sum((d[i]+360)^2)
- 2*x*sum(x[i])
- 2*x*360*(dn - cn)
+ n*x^2
dy/dx = 2*n*x - 2*sum(x[i]) - 2*360*(dn - cn)
for dy/dx = 0:
2*n*x - 2*sum(x[i]) - 2*360*(dn - cn) = 0
n*x = sum(x[i]) + 360*(dn - cn)
x = (sum(x[i]) + 360*(dn - cn))/n
This alone is not quite enough to get the minimum, while it works for normal values, that has an unbounded set, so the result will definitely lie within set's range and is therefore valid. We need the minimum within a range (defined by the segment). If the minimum is less than our segment's lower bound then the minimum of that segment must be at the lower bound (because quadratic curves only have 1 turning point) and if the minimum is greater than our segment's upper bound then the segment's minimum is at the upper bound. After we have the minimum for each segment, we simply find the one that has the lowest value for what we're minimising (sum((b[i]-x)^2) + sum(((c[i]-360)-b)^2) + sum(((d[i]+360)-c)^2)).
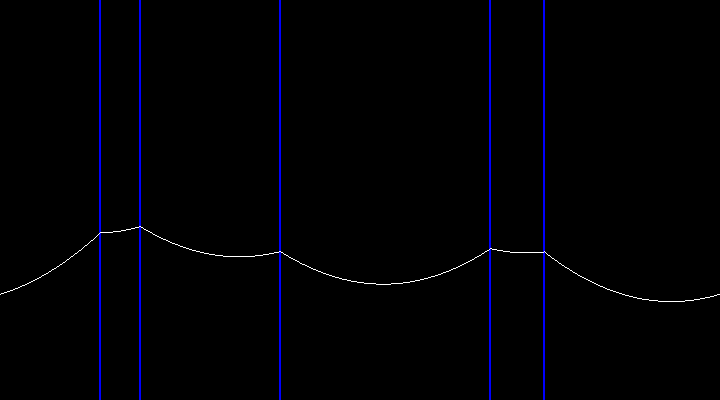
Here is an image to the curve, which shows how it changes at the points where x=(a[i]+180)%360. The data set is in question is {65,92,230,320,250}.
http://i3.photobucket.com/albums/y69/02williamsa6/curve.png
Here is an implementation of the algorithm in Java, including some optimisations, its complexity is O(nlogn). It can be reduced to O(n) if you replace the comparison based sort with a non comparison based sort, such as radix sort.
static double varnc(double _mean, int _n, double _sumX, double _sumSqrX)
{
return _mean*(_n*_mean - 2*_sumX) + _sumSqrX;
}
//with lower correction
static double varlc(double _mean, int _n, double _sumX, double _sumSqrX, int _nc, double _sumC)
{
return _mean*(_n*_mean - 2*_sumX) + _sumSqrX
+ 2*360*_sumC + _nc*(-2*360*_mean + 360*360);
}
//with upper correction
static double varuc(double _mean, int _n, double _sumX, double _sumSqrX, int _nc, double _sumC)
{
return _mean*(_n*_mean - 2*_sumX) + _sumSqrX
- 2*360*_sumC + _nc*(2*360*_mean + 360*360);
}
static double[] averageAngles(double[] _angles)
{
double sumAngles;
double sumSqrAngles;
double[] lowerAngles;
double[] upperAngles;
{
List<Double> lowerAngles_ = new LinkedList<Double>();
List<Double> upperAngles_ = new LinkedList<Double>();
sumAngles = 0;
sumSqrAngles = 0;
for(double angle : _angles)
{
sumAngles += angle;
sumSqrAngles += angle*angle;
if(angle < 180)
lowerAngles_.add(angle);
else if(angle > 180)
upperAngles_.add(angle);
}
Collections.sort(lowerAngles_);
Collections.sort(upperAngles_,Collections.reverseOrder());
lowerAngles = new double[lowerAngles_.size()];
Iterator<Double> lowerAnglesIter = lowerAngles_.iterator();
for(int i = 0; i < lowerAngles_.size(); i++)
lowerAngles[i] = lowerAnglesIter.next();
upperAngles = new double[upperAngles_.size()];
Iterator<Double> upperAnglesIter = upperAngles_.iterator();
for(int i = 0; i < upperAngles_.size(); i++)
upperAngles[i] = upperAnglesIter.next();
}
List<Double> averageAngles = new LinkedList<Double>();
averageAngles.add(180d);
double variance = varnc(180,_angles.length,sumAngles,sumSqrAngles);
double lowerBound = 180;
double sumLC = 0;
for(int i = 0; i < lowerAngles.length; i++)
{
//get average for a segment based on minimum
double testAverageAngle = (sumAngles + 360*i)/_angles.length;
//minimum is outside segment range (therefore not directly relevant)
//since it is greater than lowerAngles[i], the minimum for the segment
//must lie on the boundary lowerAngles[i]
if(testAverageAngle > lowerAngles[i]+180)
testAverageAngle = lowerAngles[i];
if(testAverageAngle > lowerBound)
{
double testVariance = varlc(testAverageAngle,_angles.length,sumAngles,sumSqrAngles,i,sumLC);
if(testVariance < variance)
{
averageAngles.clear();
averageAngles.add(testAverageAngle);
variance = testVariance;
}
else if(testVariance == variance)
averageAngles.add(testAverageAngle);
}
lowerBound = lowerAngles[i];
sumLC += lowerAngles[i];
}
//Test last segment
{
//get average for a segment based on minimum
double testAverageAngle = (sumAngles + 360*lowerAngles.length)/_angles.length;
//minimum is inside segment range
//we will test average 0 (360) later
if(testAverageAngle < 360 && testAverageAngle > lowerBound)
{
double testVariance = varlc(testAverageAngle,_angles.length,sumAngles,sumSqrAngles,lowerAngles.length,sumLC);
if(testVariance < variance)
{
averageAngles.clear();
averageAngles.add(testAverageAngle);
variance = testVariance;
}
else if(testVariance == variance)
averageAngles.add(testAverageAngle);
}
}
double upperBound = 180;
double sumUC = 0;
for(int i = 0; i < upperAngles.length; i++)
{
//get average for a segment based on minimum
double testAverageAngle = (sumAngles - 360*i)/_angles.length;
//minimum is outside segment range (therefore not directly relevant)
//since it is greater than lowerAngles[i], the minimum for the segment
//must lie on the boundary lowerAngles[i]
if(testAverageAngle < upperAngles[i]-180)
testAverageAngle = upperAngles[i];
if(testAverageAngle < upperBound)
{
double testVariance = varuc(testAverageAngle,_angles.length,sumAngles,sumSqrAngles,i,sumUC);
if(testVariance < variance)
{
averageAngles.clear();
averageAngles.add(testAverageAngle);
variance = testVariance;
}
else if(testVariance == variance)
averageAngles.add(testAverageAngle);
}
upperBound = upperAngles[i];
sumUC += upperBound;
}
//Test last segment
{
//get average for a segment based on minimum
double testAverageAngle = (sumAngles - 360*upperAngles.length)/_angles.length;
//minimum is inside segment range
//we test average 0 (360) now
if(testAverageAngle < 0)
testAverageAngle = 0;
if(testAverageAngle < upperBound)
{
double testVariance = varuc(testAverageAngle,_angles.length,sumAngles,sumSqrAngles,upperAngles.length,sumUC);
if(testVariance < variance)
{
averageAngles.clear();
averageAngles.add(testAverageAngle);
variance = testVariance;
}
else if(testVariance == variance)
averageAngles.add(testAverageAngle);
}
}
double[] averageAngles_ = new double[averageAngles.size()];
Iterator<Double> averageAnglesIter = averageAngles.iterator();
for(int i = 0; i < averageAngles_.length; i++)
averageAngles_[i] = averageAnglesIter.next();
return averageAngles_;
}
The arithmetic mean of a set of angles may not agree with your intuitive idea of what the average should be. For example, the arithmetic mean of the set {179,179,0,181,181} is 216 (and 144). The answer you immediately think of is probably 180, however it is well known that the arithmetic mean is heavily affected by edge values. You should also remember that angles are not vectors, as appealing as that may seem when dealing with angles sometimes.
This algorithm does of course also apply to all quantities that obey modular arithmetic (with minimal adjustment), such as the time of day.
I would also like to stress that even though this is a true average of angles, unlike the vector solutions, that does not necessarily mean it is the solution you should be using, the average of the corresponding unit vectors may well be the value you actually should to be using.
{kind=link}